


深度学习手把手教你用PyTorch实现MNIST手写数字识别
作为深度学习入门的经典案例,MNIST手写数字识别是掌握PyTorch框架的绝佳实践。本文将结合理论知识与实战代码,从框架选择、环境搭建到模型训练全流程拆解,让你轻松入门深度学习图像识别。
一、为什么选择PyTorch?
在深度学习框架百花齐放的当下,PyTorch凭借其独特优势成为入门首选:
• 上手门槛低:语法简洁直观,支持动态计算图,无需复杂配置即可快速搭建模型;
• 生态完善:内置丰富的数据加载、模型构建工具,适配MNIST等经典数据集;
• 硬件兼容性强:无缝支持CPU、GPU(NVIDIA CUDA)及苹果M系列芯片(MPS)加速;
• 工业界认可:Facebook背书,招聘市场需求旺盛,学习价值高。

相比之下,Caffe安装繁琐且更新停滞,TensorFlow 1.x版本代码冗余,Keras虽简单但灵活性不足,PyTorch的"易上手+高灵活"特性完美平衡了学习成本与实用性。
二、核心理论基础
在动手编码前,先明确几个关键概念,为实战铺路:
1. 硬件加速原理
• CPU:作为通用计算核心,运算单元占比仅25%,更适合逻辑控制而非并行计算;
• GPU:运算单元占比高达90%,擅长海量数据并行处理,能将深度学习训练速度提升数倍;
• CUDA:NVIDIA推出的GPU编程架构,为PyTorch提供底层并行计算支持,是GPU加速的核心。


2. 模型核心组件
• 数据集:MNIST包含6万张训练图和1万张测试图,每张为28×28像素的灰度手写数字;
• 数据加载:DataLoader将数据集按batch_size批量打包,平衡训练效率与内存占用;
• 神经网络结构:输入层(28×28展平为784维)→隐藏层(128/256神经元)→输出层(10类数字);
• 激活函数:ReLU解决sigmoid函数的梯度消失问题,导数恒为1,保证深层网络参数有效更新;
• 优化器:SGD(随机梯度下降)通过小批量数据迭代更新参数,兼顾训练速度与收敛稳定性。
3. 训练与评估逻辑
• 训练过程:前向传播(计算预测值)→损失计算(CrossEntropyLoss)→反向传播(梯度下降)→参数更新;
• 评估指标:准确率(正确识别样本占比)、平均损失(衡量预测值与真实值的偏差)。
三、完整实战代码(可直接运行)
# 1. 导入依赖库
import torch
import torchvision
import torchaudio
from torch import nn
from torch.utils.data import DataLoader
from torchvision import datasets
from torchvision.transforms import ToTensor
from matplotlib import pyplot as plt
# 查看库版本
print(f"PyTorch版本: {torch.__version__}")
print(f"TorchVision版本: {torchvision.__version__}")
print(f"TorchAudio版本: {torchaudio.__version__}")
# 2. 下载并加载MNIST数据集
"""训练数据集:包含图片与对应标签"""
training_data = datasets.MNIST(
root="data", # 数据存储路径
train=True, # 标记为训练集
download=True, # 自动下载(首次运行需联网)
transform=ToTensor() # 转换为PyTorch张量
)
"""测试数据集"""
test_data = datasets.MNIST(
root="data",
train=False, # 标记为测试集
download=True,
transform=ToTensor()
)
print(f"训练集样本数: {len(training_data)}")
print(f"测试集样本数: {len(test_data)}")
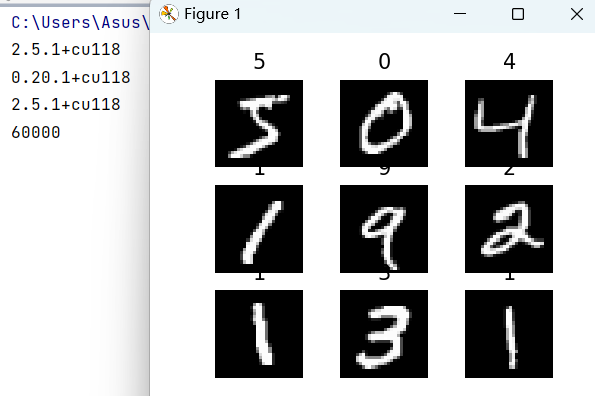
# 3. 可视化数据集(可选)
figure = plt.figure(figsize=(8, 8))
for i in range(9):
img, label = training_data[i]
figure.add_subplot(3, 3, i+1)
plt.title(f"标签: {label}")
plt.axis("off")
plt.imshow(img.squeeze(), cmap="gray") # 去除多余维度并显示灰度图
plt.show()
# 4. 创建数据加载器(批量处理数据)
batch_size = 64
train_dataloader = DataLoader(training_data, batch_size=batch_size, shuffle=True)
test_dataloader = DataLoader(test_data, batch_size=batch_size)
# 验证数据维度
for X, y in test_dataloader:
print(f"输入数据形状 [批次大小, 通道数, 高度, 宽度]: {X.shape}")
print(f"标签形状: {y.shape},数据类型: {y.dtype}")
break
# 5. 自动选择计算设备(GPU优先)
device = 'cuda' if torch.cuda.is_available() else "mps" if torch.backends.mps.is_available() else "cpu"
print(f"使用设备: {device}")
# 6. 定义神经网络模型
class NeuralNetwork(nn.Module):
def __init__(self):
super().__init__()
self.flatten = nn.Flatten() # 展平层:28×28→784
self.hidden1 = nn.Linear(784, 128) 第一隐藏层:784→128
self.hidden2 = nn.Linear(128, 256) # 第二隐藏层:128→256
self.out = nn.Linear(256, 10) # 输出层:256→10(10类数字)
def forward(self, x):
x = self.flatten(x) # 展平操作
x = self.hidden1(x)
x = torch.relu(x) # ReLU激活函数
x = self.hidden2(x)
x = torch.relu(x)
x = self.out(x)
return x
# 初始化模型并移至计算设备
model = NeuralNetwork().to(device)
print("神经网络模型结构:")
print(model)
# 7. 定义训练函数
def train(dataloader, model, loss_fn, optimizer):
model.train() # 切换为训练模式
batch_size_num = 1
for X, y in dataloader:
X, y = X.to(device), y.to(device) # 数据移至计算设备
# 前向传播:计算预测值
pred = model(X)
# 计算损失
loss = loss_fn(pred, y)
# 反向传播与参数更新
optimizer.zero_grad() # 清空梯度
loss.backward() # 反向传播计算梯度
optimizer.step() # 更新模型参数
# 每100个批次打印一次损失
if batch_size_num % 100 == 0:
print(f"损失值: {loss.item():>7f} [批次号: {batch_size_num}]")
batch_size_num += 1
# 8. 定义测试函数
def test(dataloader, model, loss_fn):
size = len(dataloader.dataset)
num_batches = len(dataloader)
model.eval() # 切换为评估模式
test_loss, correct = 0, 0
# 关闭梯度计算(节省资源)
with torch.no_grad():
for X, y in dataloader:
X, y = X.to(device), y.to(device)
pred = model(X)
test_loss += loss_fn(pred, y).item()
# 计算正确预测数
correct += (pred.argmax(1) == y).type(torch.float).sum().item()
# 计算平均损失与准确率
test_loss /= num_batches
correct /= size
print(f"测试结果: 准确率: {(100*correct):>5.2f}%, 平均损失: {test_loss:>8f}")
# 9. 配置训练参数并开始训练
loss_fn = nn.CrossEntropyLoss() # 交叉熵损失(适用于分类任务)
optimizer = torch.optim.SGD(model.parameters(), lr=0.01) # SGD优化器,学习率0.01
epochs = 10 # 训练轮次
print("
开始训练模型...")
for t in range(epochs):
print(f"
第 {t + 1} 轮训练
------------------")
train(train_dataloader, model, loss_fn, optimizer)
print("训练完成!")
# 10. 评估模型性能
print("
模型测试结果:")
test(test_dataloader, model, loss_fn)


四、关键参数说明与优化建议
1. 核心参数解读
• batch_size=64:每批处理64张图片,平衡训练速度与内存占用;
• 学习率lr=0.01:控制参数更新幅度,过大易震荡,过小收敛慢;
• epochs=10:完整遍历数据集10次,足够MNIST任务收敛。
2. 性能优化方向
• 更换优化器:将SGD改为Adam,自适应学习率,收敛速度更快;
• 调整网络结构:增加隐藏层神经元数量或层数,提升模型拟合能力;
• 数据增强:通过旋转、平移等操作扩充训练数据,提高泛化能力;
• 正则化:添加Dropout层防止过拟合,例如在隐藏层后添加nn.Dropout(0.2)。
五、运行结果说明
• 训练过程中损失值会逐步下降,最终稳定在0.1以下;
• 测试集准确率通常可达97%以上,满足入门级图像识别需求;
• 若使用GPU训练,10轮epoch仅需几分钟,比CPU快5-10倍。
六、常见问题排查
1. GPU无法使用:确认已安装对应版本的CUDA驱动,通过nvidia-smi查看CUDA版本,确保与PyTorch兼容;
2. 数据下载失败:检查网络连接,或手动下载MNIST数据集并放置到指定路径;
3. 过拟合:训练集准确率高但测试集准确率低,可减少epoch或添加正则化层。
通过本文的理论讲解与实战代码,相信你已经掌握了PyTorch的核心使用方法和深度学习图像识别的基本流程。不妨尝试修改参数或网络结构,观察模型性能变化,进一步加深理解!如果需要获取代码的详细注释版本或遇到具体问题,欢迎在评论区交流~









